

main.py
from machine import Pin,PWM #importing PIN and PWM
import time #importing time
import utime
# Defining motor pins
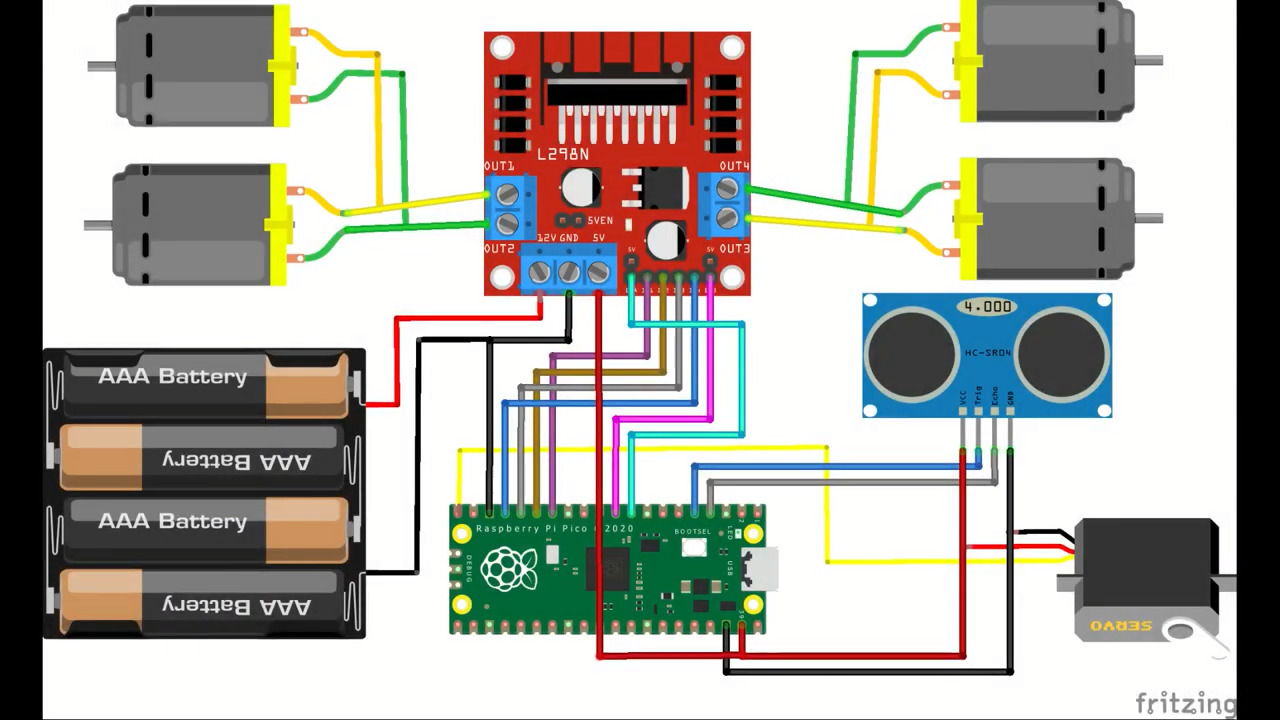
motor1=Pin(10,Pin.OUT)
motor2=Pin(11,Pin.OUT)
motor3=Pin(12,Pin.OUT)
motor4=Pin(13,Pin.OUT)
# Defining enable pins and PWM object
enable1=PWM(Pin(6))
enable2=PWM(Pin(7))
# Defining Trigger and Echo pins
trigger = Pin(3, Pin.OUT)
echo = Pin(2, Pin.IN)
# Defining Servo pin and PWM object
servoPin = Pin(15)
servo = PWM(servoPin)
duty_cycle = 0 # Defining and initializing duty cycle PWM
# Defining frequency for servo and enable pins
servo.freq(50)
enable1.freq(1000)
enable2.freq(1000)
# Setting maximum duty cycle for maximum speed
enable1.duty_u16(65025)
enable2.duty_u16(65025)
# Forward
def move_forward():
motor1.low()
motor2.high()
motor3.high()
motor4.low()
# Backward
def move_backward():
motor1.high()
motor2.low()
motor3.low()
motor4.high()
#Turn Right
def turn_right():
motor1.low()
motor2.high()
motor3.low()
motor4.high()
#Turn Left
def turn_left():
motor1.high()
motor2.low()
motor3.high()
motor4.low()
#Stop
def stop():
motor1.low()
motor2.low()
motor3.low()
motor4.low()
# Defining function to get distance from ultrasonic sensor
def get_distance():
trigger.low()
utime.sleep_us(2)
trigger.high()
utime.sleep_us(5)
trigger.low()
while echo.value() == 0:
signaloff = utime.ticks_us()
while echo.value() == 1:
signalon = utime.ticks_us()
timepassed = signalon - signaloff
dist = (timepassed * 0.0343) / 2
return dist
#Defining function to set servo angle
def setservo(angle):
duty_cycle = int(angle*(7803-1950)/180) + 1950
servo.duty_u16(duty_cycle)
setservo(90)
while True:
distance=get_distance() #Getting distance in cm
#Defining direction based on conditions
if distance < 15:
stop()
move_backward()
time.sleep(1)
stop()
time.sleep(0.5)
setservo(30) #Servo angle to 30 degree
time.sleep(1)
right_distance=get_distance()
#print(right_distance)
time.sleep(0.5)
setservo(150) #Servo angle to 150 degree
time.sleep(1)
left_distance=get_distance()
#print(left_distance)
time.sleep(0.5)
setservo(90)
if right_distance > left_distance:
turn_right()
time.sleep(2)
stop()
else:
turn_left()
time.sleep(2)
stop()
else:
move_forward()
time.sleep(0.5)

